

╩ŠĮ╠Ų„ę╗░Ńæ¬ė├ė┌╣żśIÖCŲ„╚╦Ą╚įOéõŅIė“Ż¼╩Ū╚╦ÖCĮ╗╗źĄ─ųžę¬ĮKČ╦Ż¼┤¾╝ę╩ų│ų╩ŠĮ╠Ų„Ą─Ģr║“Č╝Ģ■├µ┼R▀@śėę╗éĆå¢Ņ}Ż║╔Ž├µĄ─░┤µI║═ą²ŌoĄĮĄūėą╩▓├┤ė├Ż¼░┤µI╚ń║╬▓┘ū„▓┼─▄š²┤_┐žųŲįOéõŻ¼Š═▀@éĆå¢Ņ}Ż¼▀@└’Įo┤¾╝ęĮķĮBę╗Ž┬Ż¼ęįć°«aÖCŲ„╚╦╩ŠĮ╠Ų„×ķ└²Ż¼ŲõīŹ╦³ĘŪ│Ż║åå╬Ż¼▓┘ū„Äū▒ķŠ═─▄╩ņŽż╦³éāĄ─ū„ė├┴╦ĪŻ
ę╗Īó└╩ėŅąŠ╩ŠĮ╠Ų„═Ōė^ĮYśŗŻ║
ęįą═╠¢HT0802║═HT0804ŽĄ┴ą╩ŠĮ╠Ų„×ķ└²Ż¼Ž┬├µ╩Ū═Ōė^ĮYśŗŻ¼ć°«a╩ŠĮ╠Ų„ę╗░ŃČ╝ķL▀@éĆśėūėŻ¼┤¾▓Ņ▓╗▓ŅŻ¼ų„ę¬╣”─▄║═░┤µIę▓ø]ėąģ^äeŻ¼ŲõīŹ▀@ę▓╩Ū╠žäe┐╝┴┐▀^Ą─Ī¬Ī¬ßśī”ć°╚╦Č°įOėŗĄ─Ż¼ĘĮ▒Ń╩╣ė├┴ĢæTŻ¼║åå╬ęūīWŻ©ć°═ŌŲĘ┼ŲĄ─╩ŠĮ╠Ų„░┤µI├▄├▄┬ķ┬ķŻ¼īW┴Ģ│╔▒Šūį╚╗ĘŪ│ŻĖ▀Ż¼ėąīW┴ĢķTÖæŻ®ĪŻ
įō╩ŠĮ╠Ų„Ęų6ŅÉ░┤Ōo╝ėķ_ĻPę╗ę╗šf├„Ż¼░┤µI+ė|├■╣”─▄╝ė│ųĪŻ

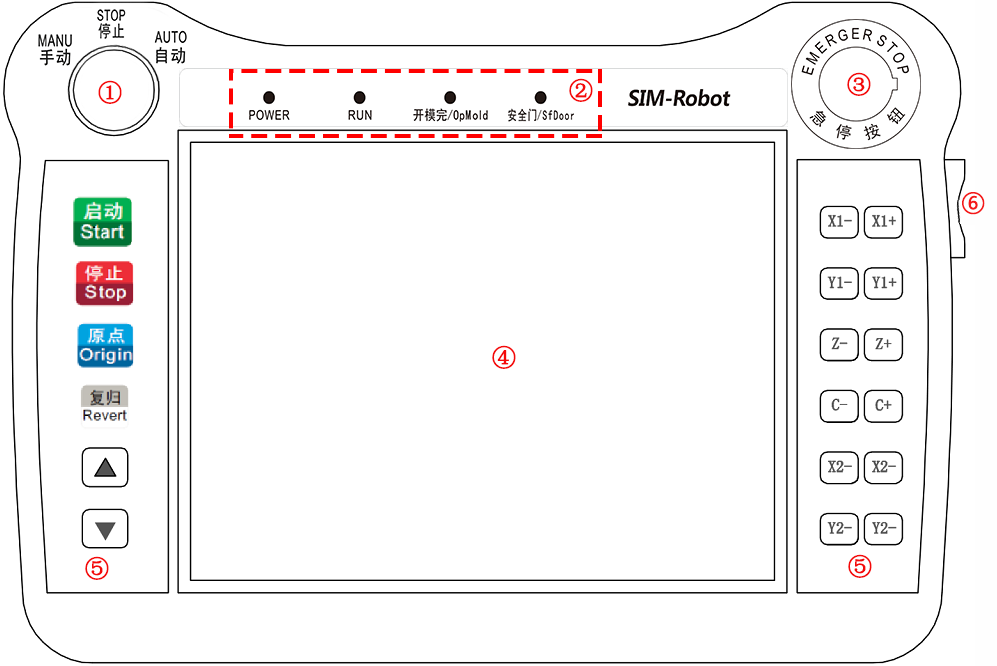
ó┘ ▀xō±ķ_ĻPŻ║Š▀ėą╩ųäėĪó═Żų╣Īóūįäė╚²éĆÖn╬╗┐╔ęį▀xō±ĪŻ
ó┌ ĀŅæBųĖ╩Š¤¶Ż║’@╩Š«öŪ░ŽĄĮyĄ─ĀŅæBĪŻ
ó█ ╝▒═Żķ_ĻPŻ║Šo╝▒═Żų╣ĪŻ
ó▄ ė|├■’@╩ŠŲ┴Ż║ė|├■╣”─▄ģ^║═’@╩ŠĮń├µģ^ė“ĪŻ
ó▌ ░┤µIģ^Ż║┐žųŲŽĄĮy▀\ąąĄ─åóäėĪó═Żų╣ĪóšęįŁ³cĪóÅ═Üw╣”─▄Īóš{╣ØÖCŲ„▀\ąą╦┘Č╚Īó┐žųŲī”
æ¬Ą─▌SĄ─▀\äėĪŻ
ó▐ ╬óäėą²ŌoŻ║īŹ¼F▌SĄ─╬óäė╣”─▄ĪŻ
▀@┴∙ŅÉ░┤µIķ_ĻPū„ė├▓╗┐╔ąĪėUŻ¼ņ`╗Ņ▓┘ū„ÖCŲ„╚╦Š═ąĶę¬═©▀^▀@ą®░┤µI║═ą²ŌoüĒīŹ¼FĪŻ═¼Ģr’@╩Šė|├■╣”─▄+░┤µI╣”─▄╩Ūę╗¾wĄ─Ż¼ÖCŲ„╚╦╩ŠĮ╠Ų„Ųõ▓┘ū„ĘĮ╩Įņ`╗ŅŻ¼┤¾╝ę┐╔ęį┬ōŽļę╗Ž┬ŲĮ│Ż═µĄ─╩ųÖCŠ═ŪÕ│■┴╦ĪŻ
Č■Īóų„Įń├µšf├„Ī¬Ī¬ęį┐žųŲÖCąĄ╩ų▒█ķ_░lĮń├µ×ķ└²
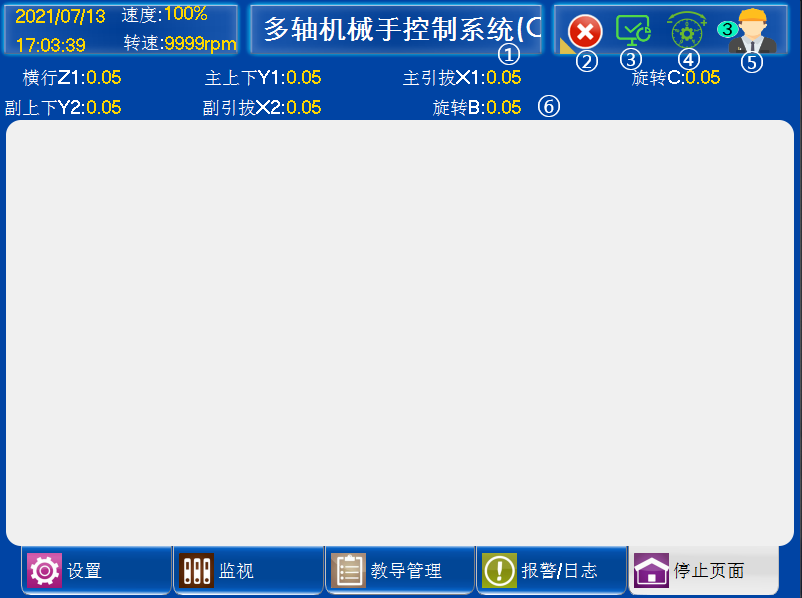
ó┘ ŽĄĮy├¹ĘQ║═«öŪ░─Ż╠¢Ż║’@╩ŠŽĄĮy├¹ĘQ║═«öŪ░▀\ąąĄ─│╠ą“├¹ĘQ╠¢ĪŻ
ó┌ įŁ³cĀŅæBŻ║«öŪ░╦┼Ę■įŁ³cś╦Č©ĀŅæBęį╝░ĖĮ╝ė╣”─▄Ž┬└ŁĪŻ
ó█ ł¾Š»ą┼Žó’@╩Šģ^Ż║³cō¶░┤ŌoŻ¼’@╩Š«öŪ░ł¾Š»ą┼ŽóĪŻ
ó▄ ØL▌å▌S▀xō±: ³cō¶░┤ŌoŻ¼ŪąōQ╬óš{ą²Ōo┐žųŲ▌SĪŻ
ó▌ ė├æ¶ÖÓŽ▐Ż║³cō¶░┤ŌoŻ¼ŪąōQ╣▄└Ēš▀ÖÓŽ▐ĪŻ
ó▐ «öŪ░▌S╬╗ų├Ż║’@╩Š«öŪ░Ė„▌SĄ─╬╗ų├ĪŻ
1) Z1 ▌SŻ║ÖCąĄ╩ųĄ─ÖM╚ļĪóÖM│÷▌SĪŻ
2) X1 ▌SŻ║ÖCąĄ╩ųų„▒█Ą─Ū░▀MĪó║¾═╦▌SĪŻ
3) Y1 ▌SŻ║ÖCąĄ╩ųų„▒█Ą─╔Ž╔²ĪóŽ┬ĮĄ▌SĪŻ
4) Z2 ▌SŻ║ÖCąĄ╩ųĖ▒▒█Ą─ÖM╚ļĪóÖM│÷▌SĪŻ
5) X2 ▌SŻ║ÖCąĄ╩ųĖ▒▒█Ą─Ū░▀MĪó║¾═╦▌SĪŻ
6) Y2 ▌SŻ║ÖCąĄ╩ųĖ▒▒█Ą─╔Ž╔²ĪóŽ┬ĮĄ▌SĪŻ
7) C/B/A ▌SŻ║ÖCąĄ╩ųą²▐D▌S╗“š▀ŅA┴¶▌SĪŻ
╚²ĪóÖCŲ„╚╦╩ŠĮ╠Ų„Įń├µ▌Säėū„▓┘ū„
šęįŁ³c║¾Ż¼╩ųäėĒō├µŽ┬┐╔▀Mąą▌SĄ─╩ųäė▓┘ū„Ż¼Įń├µ╚ńłD╦∙╩ŠŻ║

1Ż®░┤µI C ▀xō±Ż║▀xō±▌S×ķ╦┼Ę■ĢrŻ¼ŪąōQ▀xĒŚŻ¼░┤µI╩ųäė┐žųŲ╦∙▀xĄ─▌SĪŻ
2Ż®³cō¶ĪŠ▌Säėū„Ī┐░┤ŌoŻ¼╩ųäė▀xō±▌SŻ¼▌ö╚ļ╬╗ų├ųĄŻ¼³cō¶Ī░╬╗ų├+Ī▒Ī░╬╗ų├-Ī▒▀xČ©▌SĢ■▀\äėĄĮįOČ©╬╗ų├ĪŻ
3Ż®š{ÖC╣”─▄Ż║▀xō±╩╣ė├Ż¼▌ö╚ļ├▄┤a║¾┐╔’@╩Š│÷š{ÖC╣”─▄ĪŻ
«öŪ░▌SŻ║▀xō±š{įćĄ─╦┼Ę■▌SŻ╗
├┐▐DŠÓļxŻ║ī”æ¬Ī░ÖCŲ„ģóöĄ-├┐▐DŠÓļxĪ▒ģóöĄŻ¼ĘĮ▒Ńė├涚{ÖCĢrą▐Ė─Ż╗
ŠÄ┤aŲ„├}ø_Ż║«öŪ░▌S▀\ąąĢrŻ¼╦┼Ę■ļŖÖCĘ┤üĄ─īŹļH├}ø_öĄŻ╗
ā╚▓┐├}ø_Ż║«öŪ░▌S▀\ąąĢrŻ¼ŽĄĮy░l│÷Ą─├³┴Ņ├}ø_öĄŻ╗
š²▐DŻ║³cō¶ę╗┤╬Ż¼ļŖÖCš²▐Dę╗╚”Ż╗
Ę┤▐DŻ║³cō¶ę╗┤╬Ż¼ļŖÖCĘ┤▐Dę╗╚”Ż╗
ŪÕ┴ŃŻ║īóŠÄ┤aŲ„├}ø_Īóā╚▓┐├}ø_ėŗöĄųĄŪÕ 0Ż╗
4Ż®ū╦ä▌┐╔▀xō±╦«ŲĮ║═┤╣ų▒Ż¼ī”æ¬Ą─ū╦ä▌░l╔·ūā╗»ĪŻŻ©ū╦ä▌ 1Īóū╦ä▌ 2 į┌ĮYśŗģóöĄųąįOų├Ī░┤╣ų▒╦«ŲĮ 1Ī▒ĪóĪ░┤╣ų▒╦«ŲĮ 2Ī▒×ķĪ░╩╣ė├Ī▒╗“Ī░▓╗╩╣ė├Ī▒Ż®
ūóŻ║ŠG¤¶×ķ▌ö╚ļŽ▐╬╗ą┼╠¢Ż¼╝t¤¶×ķ▌ö│÷ą┼╠¢Ż¼╚ń╣¹ø]ėąą┼╠¢▌ö╚ļ╗“š▀▌ö│÷ųĖ╩Š¤¶╠Äė┌Ž©£ńĀŅæB
